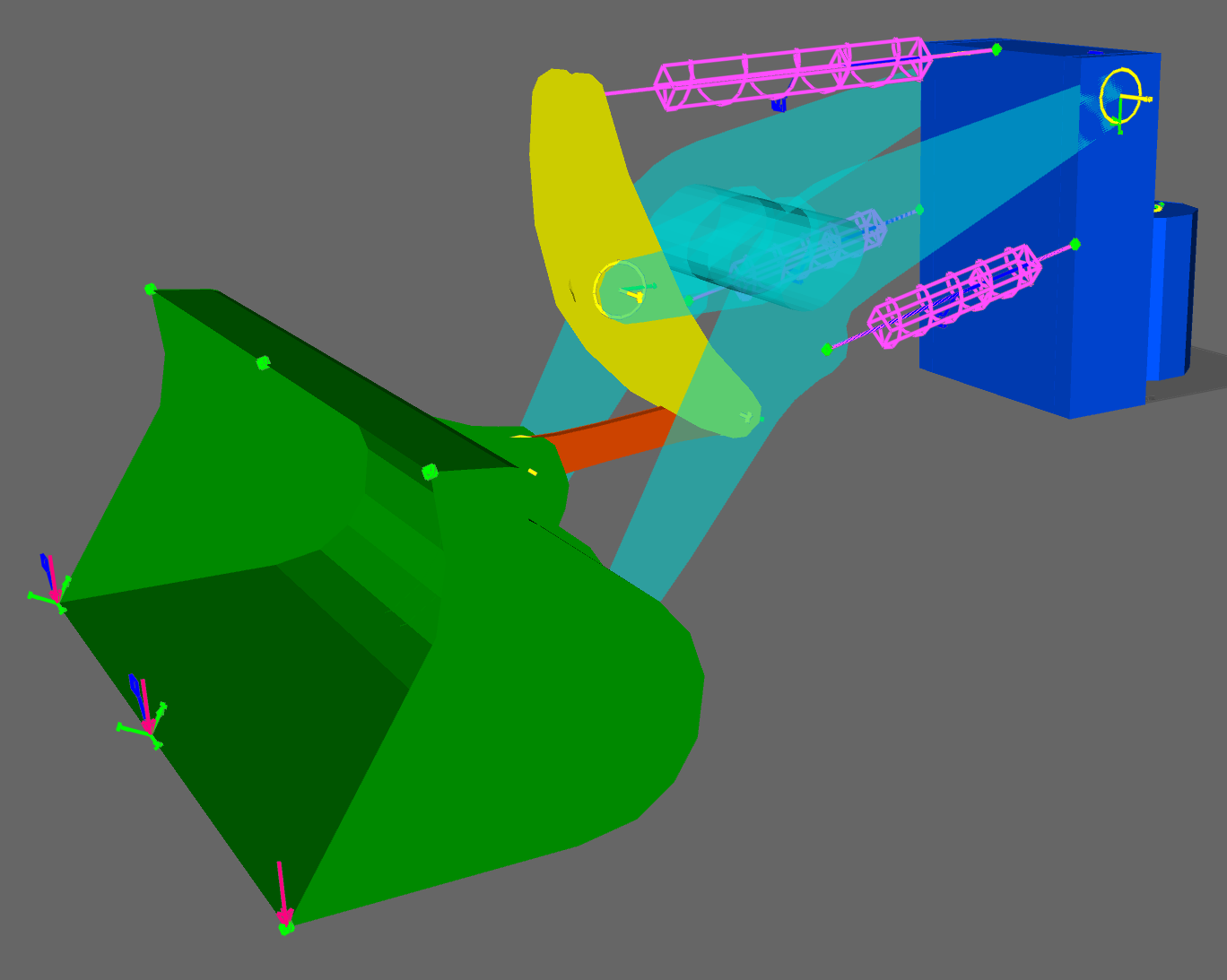
The Loader
This model represents a simplified front-end of a front loader and consists of the following FE Parts:
- Loader Front Frame
- Lifting Arm
- Bucket
- Bell crank
- Bucket link
The hydraulic cylinders are represented by Axial Springs and Dampers, while the joints are represented by Revolute joint objects.
Basic lifting operation
The model is activated with a time-dependent function for the spring elongation.
The model is loaded by increasing the mass in the bucket.
Solver control with Python API
from pathlib import Path
from fedempy.fmm_solver import FmmSolver
from fedempy.modeler import FedemModeler
from fedempy.enums import FmDof, FmDofStat, FmLoadType, FmType, FmVar
...
Load driven Digital Twin
from pathlib import Path
from fedempy.fmm_solver import FmmSolver
from fedempy.modeler import FedemModeler
from fedempy.enums import FmDof, FmDofStat, FmLoadType, FmType, FmVar
from _clean_path import clean_path
# Global constants
RELATIVE_PATH = '00-loader-Base_case/'
MODEL_FILE = '00-loader-Base_case.fmm'
PARTS_PATH = 'parts/'
# Prepare run directory (=RELATIVE_PATH)
model_file = Path(RELATIVE_PATH) / MODEL_FILE
# parts_path = '../'*RELATIVE_PATH.count('/') + PARTS_PATH
clean_path(model_file.parent)
my_model = FedemModeler(str(model_file), force_new=True)
p1 = my_model.make_fe_part(PARTS_PATH + 'Front.flm')
p2 = my_model.make_fe_part(PARTS_PATH + 'Boom.flm')
p3 = my_model.make_fe_part(PARTS_PATH + 'Bucket.flm')
p4 = my_model.make_fe_part(PARTS_PATH + 'BellCrank.flm')
p5 = my_model.make_fe_part(PARTS_PATH + 'BucketLink.flm')
my_model.edit_part([p1, p2, p3, p4, p5],
alpha2=0.00286, component_modes=0, consistent_mass=True)
my_model.edit_part(p2, Tx=0.01080263, Tz=-0.77487206)
my_model.edit_part(p3, Tx=-0.64636636, Tz=-2.0328088, Ry=-30, Rz=-180)
my_model.edit_part(p4, Tx=-3.2499752, Ty=-2.8376081, Tz=0.04694241, Ry=21.814096)
my_model.edit_part(p5, Tx=-2.041544, Ty=-0.92750001, Tz=0.12191465, Ry=-4.9156169)
# Create revolute joints coupling the FE parts together and to ground
joints = []
joints.append(my_model.make_joint('Rev1', FmType.REVOLUTE_JOINT, 8))
joints.append(my_model.make_joint('Rev2', FmType.REVOLUTE_JOINT, 11))
joints.append(my_model.make_joint('Rev3', FmType.REVOLUTE_JOINT, 19, 7))
joints.append(my_model.make_joint('Rev4', FmType.REVOLUTE_JOINT, 24, 6))
joints.append(my_model.make_joint('Rev5', FmType.REVOLUTE_JOINT, 38, 22))
joints.append(my_model.make_joint('Rev6', FmType.REVOLUTE_JOINT, 33, 17))
joints.append(my_model.make_joint('Rev7', FmType.REVOLUTE_JOINT, 49, 21))
joints.append(my_model.make_joint('Rev8', FmType.REVOLUTE_JOINT, 48, 20))
joints.append(my_model.make_joint('Rev9', FmType.REVOLUTE_JOINT, 56, 47))
joints.append(my_model.make_joint('Rv10', FmType.REVOLUTE_JOINT, 55, 35))
my_model.edit_joint(joints[2], Ry=90, Rz=-90)
[my_model.edit_joint(id, Rx=90) for id in joints[3:]]
f1 = my_model.make_function('Lift Cylinders',
frequency=0.625, amplitude=0.15, delay=0.25, mean_value=0.15, end=0.8)
f2 = my_model.make_function('Boom Cylinder',
slope=-0.5, start_ramp=0.5, end_ramp=1.2)
f3 = my_model.make_function('Rotation Front',
frequency=0.5, amplitude=0.262, delay=0.25, mean_value=0.262, end=1.0)
f4 = my_model.make_function('Bucket Load',
slope=50000, start_ramp=0.7, end_ramp=1.2)
my_model.edit_joint(joints[0], constraints={'Rz' : FmDofStat.SPRING},
spring={'Rz' : 1.0e9}, length={'Rz' : f3})
cyl = my_model.make_spring('Lift cylinder', [(9, 23), (10, 18)],
init_Stiff_Coeff=1.0e9, length=f1)
cyl.append(my_model.make_spring('Boom cylinder', (5, 50),
init_Stiff_Coeff=1.0e9, length=f2))
my_model.make_load('Load', FmLoadType.FORCE, 39, (0, 0, -1), fn=f4)
my_model.fm_solver_setup(t_inc=0.01, t_end=1.6)
my_model.save()
my_model.close()
# Solver setup and execution
my_solver = FmmSolver()
my_solver.solve_all(str(model_file), True, True)
my_solver.solver_close()
my_solver.close_model(False)
Low-code modeling
target_file: 02-loader-y100.fmm
file_exists: OVERWRITE!
fe_parts:
p1: [parts/Front.ftl]
p2: [parts/Boom.ftl]
p3: [parts/Bucket.ftl]
p4: [parts/BellCrank.ftl]
p5: [parts/BucketLink.ftl]
triads_from_fe_parts:
Front_fix_bottom: [Front bottom bearing housing to ground, p1, node, 441]
front_fix_top: [Front top bearing housing to ground, p1, node, 211]
front_right_housing: [Front right bearing housing, p1, node, 38]
front_left_housing: [Front left bearing housing, p1, node, 58]
front_top_cylinder_attachment: [Front top cylinder attachment point, p1, node, 18]
front_right_cylinder_attachment: [Front right cylinder attachment point, p1, node, 222]
front_left_cylinder_attachment: [Front left cylinder attachment point, p1, node, 235]
boom_rear_right_houding: [Boom right rear bearing housing, p2, node, 1038]
boom_rear_left_housing: [Boom left rear bearing housing, p2, node, 178]
boom_front_right_housing: [Boom right front bearing housing, p2, node, 715]
boom_front_left_housing: [Boom left front bearing housing, p2, node, 5]
boom_right_bellcrank_housing: [Boom right bearing housing to BellCrank, p2, node, 545]
boom_left_bellcrank_housing: [Boom left bearing housing to BellCrank, p2, node, 424]
boom_right_cylinder_attachment: [Boom right cylinder attachment point, p2, node, 829]
boom_left_cylinder_attachment: [Boom left cylinder attachment point, p2, node, 119]
bucket_right_housing: [Bucket right housing, p3, node, 509]
bucket_mid_housing: [Bucket midt housing, p3, node, 451]
bucket_left_housing: [Bucket left housing, p3, node, 284]
bellcrank_top_housing: [BellCrank top housing, p4, node, 420]
bellcrank_bottom_housing: [BellCrank bottom housing, p4, node, 14]
bellcrank_right_housing: [BellCrank right housing, p4, node, 276]
bellcrank_left_housing: [BellCrank left housing, p4, node, 244]
bucketlink_rear_houding: [BucketLink rear housing, p5, node, 575]
bucketlink_front_housing: [BucketLink front housing, p5, node, 174]
edit_fe_parts:
p1: &link_property
alpha2: 0.00286
component_modes: 0
consistent_mass: True
p2:
<<: *link_property
Tx: 0.01080263
Tz: -0.77487206
p3:
<<: *link_property
Tx: -0.64636636
Tz: -2.0328088
Ry: -30
Rz: -180
p4:
<<: *link_property
Tx: -3.2499752
Ty: -2.8376081
Tz: 0.04694241
Ry: 21.814096
p5:
<<: *link_property
Tx: -2.041544
Ty: -0.92750001
Tz: 0.12191465
Ry: -4.9156169
joints:
j01: [Front bottom to ground, BALL_JOINT, Front_fix_bottom]
j02: [Front top to ground, BALL_JOINT, front_fix_top]
j03: [Front to boom right, BALL_JOINT, front_right_housing, boom_rear_right_houding]
j04: [Front to boom left, BALL_JOINT, front_left_housing, boom_rear_left_housing]
j05: [Boom to bucket right, BALL_JOINT, boom_front_right_housing, bucket_right_housing]
j06: [Boom to bucket left, BALL_JOINT, boom_front_left_housing, bucket_left_housing]
j07: [Bucket link rear, BALL_JOINT, bucketlink_rear_houding, bellcrank_bottom_housing]
j08: [Bucket link front, BALL_JOINT, bucketlink_front_housing, bucket_mid_housing]
j09: [Boom to bellCrank right, BALL_JOINT, boom_right_bellcrank_housing, bellcrank_right_housing]
j10: [Boom to BellCrank left, BALL_JOINT, boom_left_bellcrank_housing, bellcrank_left_housing]
hydraulic_cylinders: # User-defined function
Top_cylinder: [Top cylinder, front_top_cylinder_attachment,
bellcrank_top_housing, 0.15, 0.12, 0.05, 0.7, 0.7, 1.0e+4]
Right_cylinder: [Right cylinder, front_right_cylinder_attachment,
boom_right_cylinder_attachment, 0.15, 0.12, 0.05, 0.7, 0.7, 1.0e+6]
Left_cylinder: [Left cylinder, front_left_cylinder_attachment,
boom_left_cylinder_attachment, 0.15, 0.12, 0.05, 0.7, 0.7, 1.0e+6]
fedem_objects:
p10:
kind: PART
ORIGINAL_FE_FILE: parts/Front.ftl
COORDINATE_SYSTEM:
- [1.0, 0.0, 0.0, 1.0]
- [0.0, 1.0, 0.0, 1.0]
- [0.0, 0.0, 1.0, 1.0]
DESCR: Front no. 2 | tagging_2